Connectivity & automation for safe and efficient mobility
Mobility as a Service (MaaS) is not a new concept for the automotive industry. For some time, there have been discussions surrounding the benefit of owning a vehicle versus public transport solutions, including trains, buses, and taxis, to fulfil society’s mobility needs.
Most private vehicles spend about ten per cent of their life being actively used, which is inefficient and costly for the environment, but vehicle ownership continues to be the preferable, and for some the only option, for many. Ease of use and the ability to travel directly to the desired end location is more appealing than the lack of flexibility imposed by scheduled services which are also perceived to be slow, unreliable and in some contexts, more costly alternatives.
As part of HORIBA MIRA’s 75th anniversary celebrations, Pawel Jaworski, Innovation Lead for Connected Autonomous Vehicles, shares his beliefs that autonomous vehicles will fundamentally shift society’s attitude towards MaaS solutions that break the connection with personal car ownership.
With the advent of MaaS relying on the advancement of autonomous vehicles, he looks at how this will be achieved through the development of a rigorous testing capability, explaining further how HORBA MIRA is developing advanced testing for AVs that will unlock the future of MaaS.

The benefits of Autonomous MaaS
Autonomous MaaS has the potential to overcome many of the limitations of current transport systems that favour privately owned, manually operated cars and vans. It also offers a solution to the “last mile” problem enabling cost effective and timely access to transport hubs. Autonomous vehicles remove driver costs, whether taxi drivers or light freight such as parcels and deliveries. Vehicle utilisation can be significantly increased, reducing waste and draw on resources, while the bespoke door-to-door and private ride potential with autonomous pods means MaaS can overcome the limitations of existing forms of public transport.
How to Make Autonomous MaaS Happen
Despite much talk around the future of autonomy, progression is hindered by key considerations.
Most important is ensuring that driverless vehicles are not only safe for passengers, other road users and pedestrian, but also energy efficient and environment friendly. Connected autonomous driving technologies like this, can optimise traffic flow and reduce overall energy requirements, all of which could support in meeting the UK’s ambitious emission reduction goals.
Secondly, is deciding who is responsible for deciding whether an autonomous car is safe to be rolled out on public roads. And finally, if there is an accident involving an autonomous vehicle, who is responsible?
To solve these issues, rigorous testing of vehicles, their subsystems and connectivity is vital. However, to test every potential circumstance the vehicle may encounter when on public roads demands a significant amount of testing mileage across numerous environments, something that is not efficient or cost-effective.
One of the most significant solutions to this is scenario-based testing, where it is possible to evaluate a vehicle, or vehicle subsystems, using realistic scenarios that car may face without the need for high-levels of mileage and time. These scenarios can be delivered/executed either on the proving ground with real-life vehicles, in simulation, or using a mixture of both, otherwise known as mixed reality testing.

Image 2- cooperative platoon mixed reality merge scenario featuring a single physical actor and multiple simulated actors.
Mixed reality testing allows for vehicles under test to be placed in various scenarios it may face on the public roads, including varying dynamic elements such as other vehicles, weather conditions, pedestrians and traffic lights. Furthermore, testing can allow for connectivity to be checked, including how the vehicle connects to, and interacts with other vehicles, the state of the wireless networks and any cybersecurity threats that may be present.
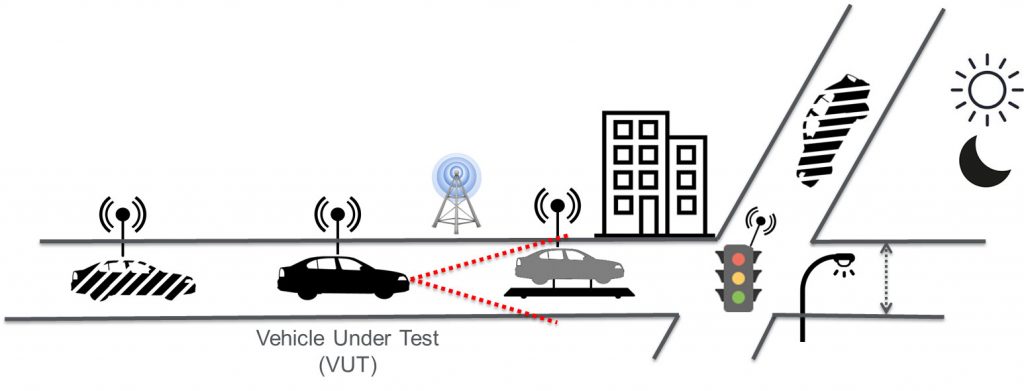
Image 3 – Urban mixed reality test scenario featuring physical/simulated test actors and infrastructure
At HORIBA MIRA, the testing of autonomous vehicles has been a significant focus for many years. First introduced in 2014 with the deployment of the Cooperative Driving Platform (CDP)-and has since evolved into the DigiCAV Proving Ground. Which is soon to be part of HORIBA MIRA’s ASSURED CAV facilities, that enables vehicle testing in multiple scenarios, including City and Parking facilities, to accelerate the progress of CAV vehicles through all stages of the development process, and to make the future of autonomous driving and shared mobility a reality.





